Complete Guide to Robot End Effectors: Types and Applications in Robotics

You might be an engineer working on a new robotic project, a business owner looking to automate a process, or a robotics enthusiast eager to build your creation. Whichever you are, you’re likely facing the daunting task of choosing the right robotic end effector.
Well, relax. This comprehensive guide is here to walk you through everything you need to know about robotic end effectors, from their basic functions to the latest innovations.
What are Robot End Effectors?

A robotic end effector is essentially the ‘hand’ or the business – end of a robot arm. It’s the device that attaches to the end of the robot’s manipulator and enables it to interact with the environment.
How do End Effectors Function in Robotics?

End effectors function by receiving commands from the robot’s control system. These commands can be based on pre-programmed sequences, real-time sensor data, or a combination of both.
If the end effector has sensors, like a force-torque sensor, the control system can adjust the gripper’s actions based on the sensor feedback. For example, if the sensor detects that the gripper is applying too much force on a delicate object, the control system can reduce the gripping force.
Why are End Effectors Critical in Robotic Systems?

End effectors are the key to a robot’s functionality. Without them, robots would be limited to simple movements and unable to perform useful tasks. In fact, a study by the Robotic Industries Association found that 90% of the value-added tasks in industrial robotics are carried out by end effectors.
In manufacturing, end effectors enable robots to carry out complex assembly tasks, increasing productivity and reducing human error.
What are the Key Components of an End Effector?
Actuators
Actuators are responsible for providing the motion required for the end effector to perform its task. In an end-effector gripper, actuators could be motors or pneumatic cylinders.
For example, a robotic gripper might use electric motors to control the opening and closing of its jaws. The type of actuator chosen depends on factors like the required force, speed, and precision of the end effector.
Sensors
Sensors play a crucial role in enabling the end effector to interact with the environment effectively. Force-torque sensors can measure the forces and torques applied by the end effector, which is useful for tasks like assembly and handling delicate objects. Vision sensors, such as cameras, can help the end effector identify and locate objects.
Tactile sensors can provide information about the surface texture and shape of the object being grasped. For example, in a service robot that needs to pick up different objects, tactile sensors can help it adjust its grip based on the object’s characteristics.
Structure
The structure of the end effector provides the physical framework for the other components. It needs to be strong enough to withstand the forces involved in the task and lightweight enough not to overburden the robot arm.
For example, in a high-speed pick-and-place application, a lightweight yet sturdy structure is essential for the end-effector gripper to move quickly and accurately.
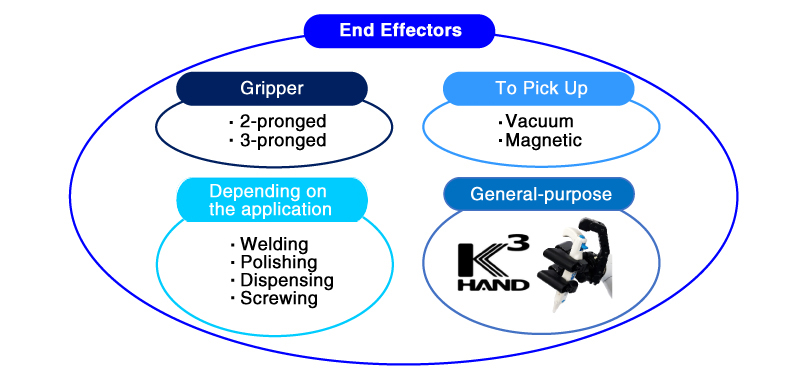
What Types of Robot End Effectors Exist?

Grippers
Grippers are one of the most common types of end effectors. They are designed to grasp and hold objects. A gripper works by using a mechanism, such as jaws or fingers, to close around an object. There are different types of grippers:
- Parallel-Jaw Grippers: These grippers have two parallel jaws that move towards each other to grasp an object. They are ideal for picking up flat-shaped objects like sheets of metal or cardboard boxes. In a packaging factory, parallel-jaw grippers are often used to pick up boxes from a conveyor belt and place them on a pallet.
- Angular – Jaw Grippers: The jaws of angular – jaw grippers move at an angle. They are useful for handling objects with irregular shapes, as the angled jaws can conform better to the object’s contours. For example, in a recycling plant, angular – jaw grippers can pick up various waste items.
- Suction Grippers: Suction grippers use vacuum pressure to hold objects. They are suitable for handling flat, smooth, and lightweight objects such as glass panels or printed circuit boards. In an electronics manufacturing facility, suction grippers are commonly used to pick up and move delicate circuit boards.
- Magnetic Grippers: Magnetic grippers use magnetic force to attract and hold ferromagnetic objects. In a metalworking factory, magnetic grippers can lift and move large metal plates or components.
Tools
Tools are another important type of end effector. They enable robots to perform tasks like welding, drilling, and painting. For example, a welding end effector, which consists of a welding torch, allows a robot to carry out welding operations in a manufacturing plant.
Painting end effectors can apply paint evenly on surfaces, such as in the automotive painting process, where robotic painting can reduce paint waste and improve the quality of the finish.
Specialized End Effectors
Specialized end effectors are custom – designed for unique applications. In the aerospace industry, a specialized end effector might be designed to handle and install delicate and complex aircraft components.
In the medical field, an end-effector rehabilitation robot uses specialized end-effectors to assist patients in physical therapy. These end effectors are tailored to the specific requirements of the application, often incorporating a combination of different technologies.
How are End Effectors Classified?

Active vs. Passive End Effectors
Active end effectors are those that can actively change their state or perform an action. For example, an end-effector gripper that can open and close its jaws is an active end-effector.
A simple hook-like end effector that is used to hang objects is passive. It relies on the movement of the robot arm to perform its function.
Compliance vs. Rigid End Effectors
Compliance end effectors are designed to have some flexibility. They can adapt to small variations in the position or shape of the object being manipulated. For example, a compliant gripper might have flexible fingers that can conform to the shape of an object.
This is useful for handling delicate or irregularly shaped objects. Rigid end effectors, on the other hand, are stiff and do not have much flexibility. They are suitable for tasks that require high precision and where the object’s position and shape are well-defined, such as in a precision assembly operation.
Sensor – Integrated End Effectors
Sensor-integrated end effectors play a crucial role in modern robotics. They can provide real-time information about the interaction between the end effector and the environment.
Vision-integrated end effectors can identify objects, locate them, and even inspect them for defects. In a quality inspection process, a vision-integrated end effector can detect if a product has any scratches or imperfections.
What are the Applications of Robot End Effectors?

Industries
Robot end effectors are used in a wide range of industries. In the manufacturing industry, they are used for tasks like assembly, material handling, and quality control.
According to a report by MarketsandMarkets, the global market for robotic end effectors in the manufacturing industry is expected to reach $6.8 billion by 2028, growing at a CAGR of 10.5% from 2023 to 2028.
Manufacturing Automation
In manufacturing automation, end effectors are used for various tasks. Assembly end effectors, such as screwdriver-like end effectors, can automate the process of fastening components together.
For example, in a smartphone manufacturing plant, end-effector grippers can pick up components for assembly, and vision-based end-effectors can inspect the final product for any cosmetic or functional defects.
Healthcare Robotics
In healthcare robotics, end effectors play vital roles. In surgical robots, end effectors are designed to hold surgical instruments with high precision. These end effectors can be controlled by surgeons to perform minimally invasive surgeries.
In an end-effector rehabilitation robot, the end-effector is used to assist patients in performing physical therapy exercises. It can apply the right amount of force and resistance based on the patient’s condition and the therapy requirements.
Service Robotics
In service robotics, end effectors enable robots to perform tasks like cleaning, delivery, and customer service. For example, a cleaning robot might have an end effector that can hold a cleaning cloth or a vacuum cleaner attachment.
A delivery robot could have an end-effector gripper to pick up and deliver packages. In a hotel, a service robot with an end effector could be used to carry items like towels or room service orders to guests’ rooms.
What Factors Influence the Selection of an End Effector?

Task Requirements
The nature of the task is a primary factor. If the task involves picking up and moving heavy objects, a gripper with a high load-carrying capacity is required.
For example, in a construction site, a magnetic gripper with a high payload capacity would be suitable for moving steel beams. If the task is delicate like handling a fragile electronic component, a gripper with precise control and gentle gripping force is needed.
Environmental Conditions
As mentioned earlier, environmental conditions play a role. In a humid environment, the end effector needs to be resistant to corrosion. In a dusty environment, it should be designed to prevent dust from entering sensitive components.
For example, in a mining environment, an end-effector gripper might need to be sealed to prevent dust from affecting its operation.
Compatibility
Compatibility with the robotic arm, control system, and other components in the robotic system is crucial. The end effector’s mechanical dimensions, power requirements, and communication protocols need to match those of the robot.
CNC Manufacturing and XMAKE

In the production of robotic end effectors, CNC (Computer-Numerical-Control) machining plays a vital role. CNC turning is used to create cylindrical components such as shafts for end-effector grippers. It can precisely control the diameter and length of the shaft.

FAQs
What is an end effector in robotics?
An end effector in robotics is the device at the end of a robot arm. It enables the robot to interact with its environment, performing tasks like grasping, manipulating objects, or using tools.
What is a gripper in robotics?
A gripper in robotics is a type of end effector. It’s designed to grasp and hold objects. Grippers can have different mechanisms, such as jaws or suction cups, to securely hold items for various tasks.
What is the robot’s gripper sometimes called an end?
The robot’s gripper is sometimes called an end-effector because it’s located at the end of the robot arm and is the part that directly interacts with objects, similar to how an end-effector is the terminal device for task performance.
What is a gripper in the robot end of the arm?
A gripper at the robot end of the arm is a tool-like attachment. It allows the robot to pick up, move, and place objects, which is crucial for tasks like assembly, material handling, and many other robotic operations.